More info in: Gugerty, L. (2004). Using cognitive task analysis to design multiple synthetic tasks for uninhabited aerial vehicle operation. In S. Schiflett, L. Elliott, E. Salas & M. Coovert (Eds.), Scaled Worlds: Development, Validation, and Application, (pp. 240-262). London: Ashgate Publishers.
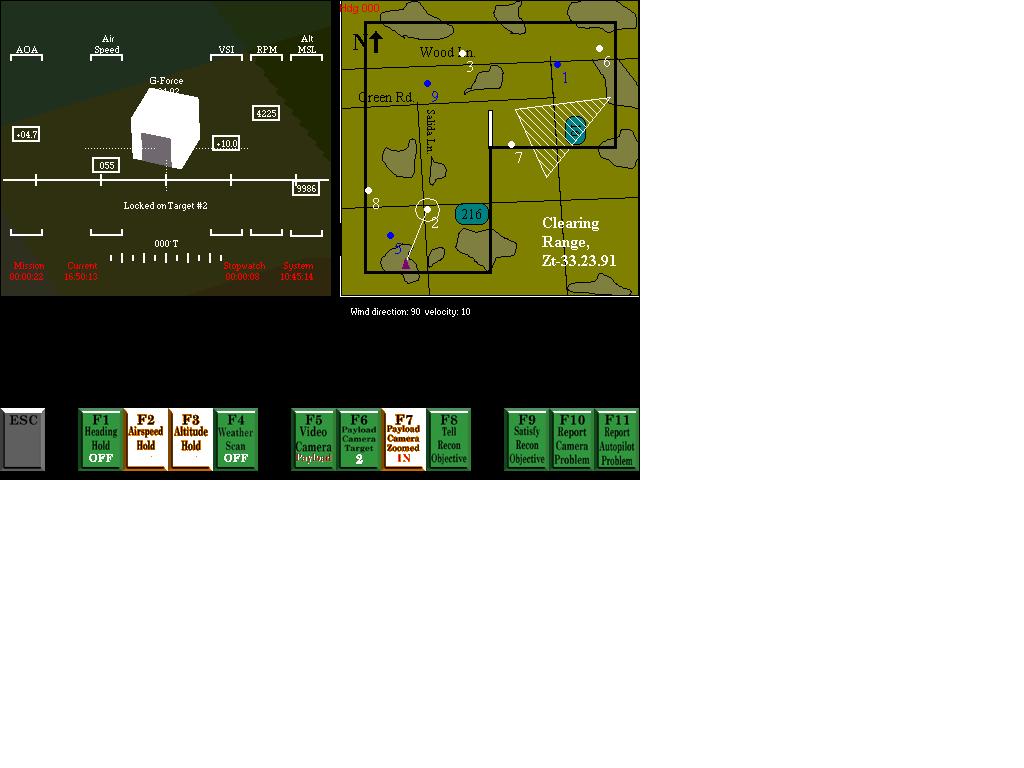
Screen from UAV simulator showing camera view (from nose or belly camera) on left and tracker map on right.